3-Axis Robotic Arm Control System
3-axis robotic arm control system.
*Description
This was a project for the company Natural Machines Inc. They design, manufacture and sell a fully functional 3D Food Printer called Foodini. The objective of the project was to replicate the movements of the Foodini with a 3-axis robot with the use of the same electronics of the initial machine. I used Python to develop a program that would take the inputs of the Foodini and translate them to a code that would make the robot move the same way as the Foodini was intended to. This was made with a combination of Linear Algebra and Inverse Kinematics. Finally, the robot successfully followed the movements from the Foodini and to demonstrate it, I programmed the robot to write the logo of the company with a pen attached to it, as you can see in the images below.
*Key Achievements
- •Successfully replicated the movements of the Foodini with a 3-axis robot
- •Programmed the robot to write the logo of the company with a pen attached to it
- •Demonstrated the robot's capabilities to the company's CEO and other executives
*Technologies
*Project Gallery

Robotic arm
Robot interface controls

Very hacky electronics wiring :p
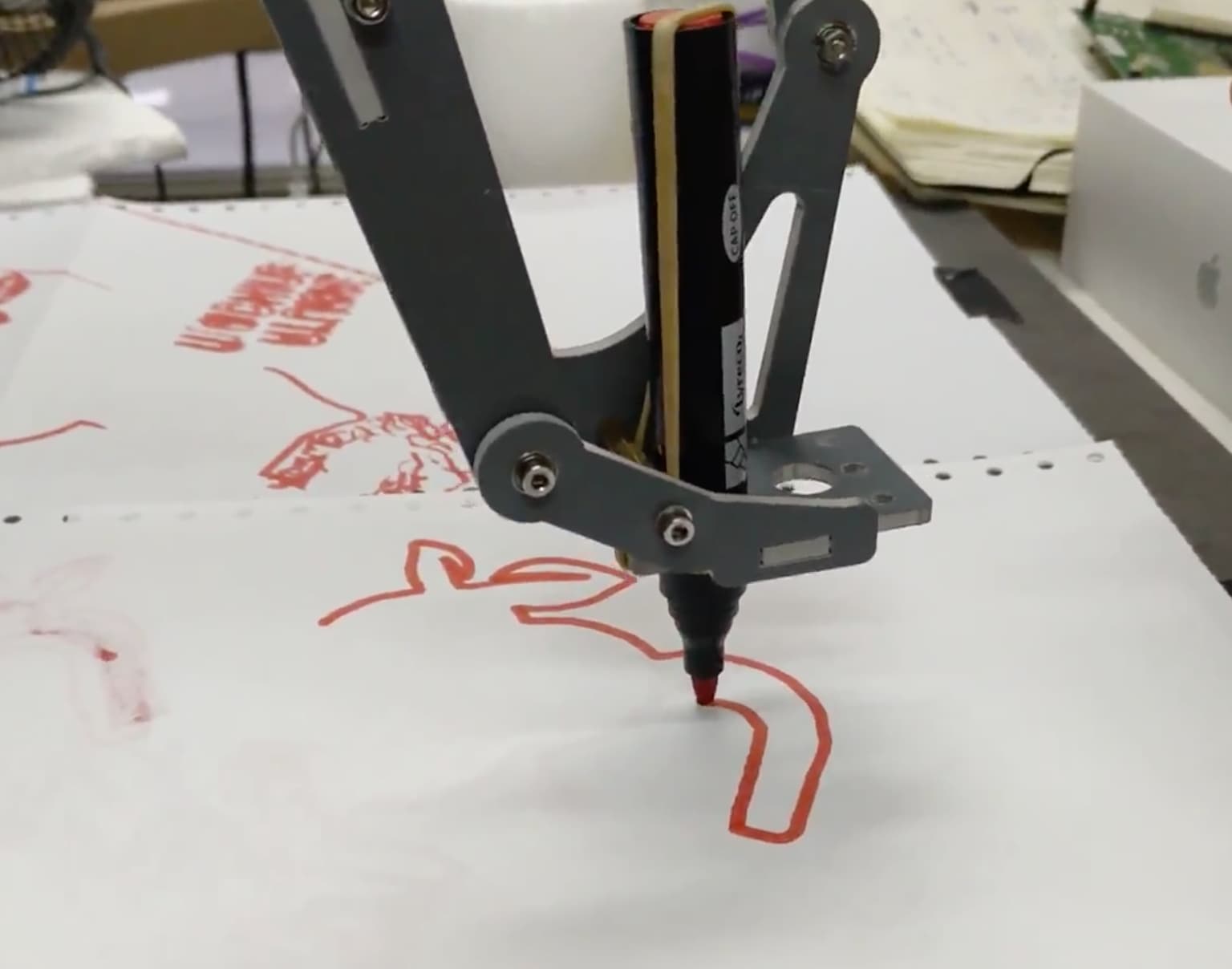
Robotic arm writing company's logo
How everything started